步進電機作為一種控制電機,可以將電脈沖信號轉化為角位移,在3D打印機、醫療設備、機器人等領域應用廣泛。前面我們寫了很多篇文章解釋步進電機的運行原理,大多著眼于電機本身,但對于步進電機而言,驅動器的重要性就像操作系統對于電腦一樣。而要理解步進電機驅動器的核心原理,我們不妨從步進電機本身的運行機理說起,一步步揭示驅動器設計中面臨的矛盾,以及現代驅動技術如何優雅地解決這些矛盾的。
一、為什么需要驅動器
步進電機的轉動并非依靠連續電流,而是需要各相勵磁線圈按照特定的順序依次通電。
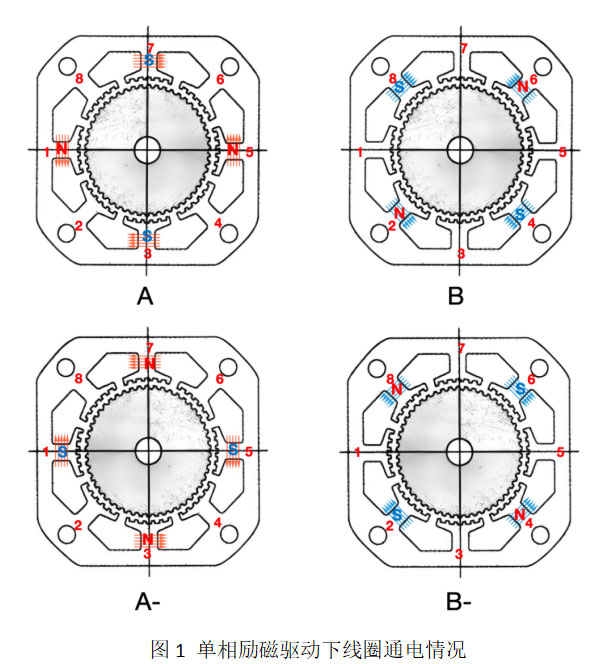
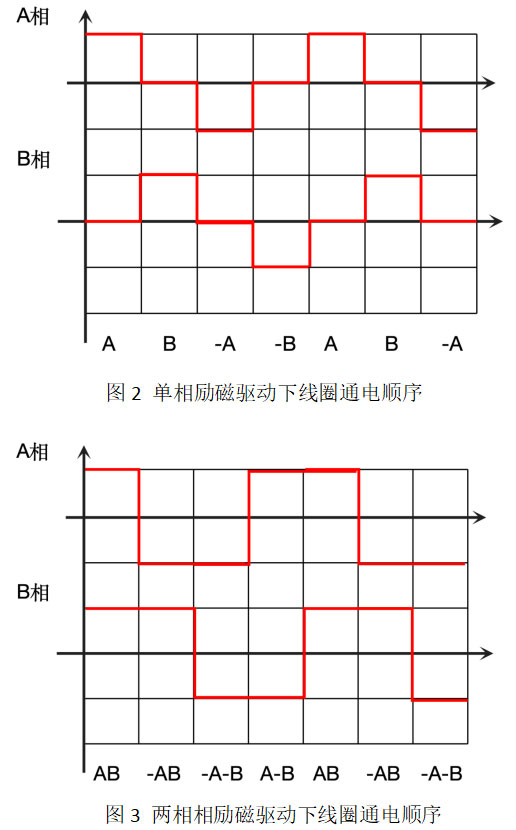
如圖1所示,單相勵磁驅動下,A/B兩相線圈按照A_B_A-_B-_A的順序依次通電,每一次通電,電機轉子便移動一個步距角,如此循環,電機便實現了連續的旋轉運動。而A/B兩相電流的情況如圖2所示。若是兩相勵磁,那么兩相通電情況如圖3所示。
這種工作方式決定了步進電機無法直接由單純的直流電源或交流電源驅動,而需要一個專門的“控制器”來按照時序給各相線圈通電。更關鍵的是,脈沖持續的時間決定了電機的轉速——轉速越高,每相通電的時間就越短,通常在毫秒甚至微秒級別。例如:對于1.8°的步進電機,信號頻率為500pps時,電機的轉速為60*500*1.8°/360°=150rpm,此時,每個信號持續2ms,每相線圈的通電時間也就是2ms。當電機轉速達到300rpm時,這個時間縮減到1ms。在如此短的時間內完成通電、斷電的精確控制,依靠人工或簡單的開關顯然不現實,這便是步進電機驅動器存在的目的:按需、按時、按序為各相線圈提供電流。

二、力矩與發熱的矛盾
我們都知道步進電機的輸出力矩主要來源于電磁力矩,而電磁力矩的大小直接取決于線圈中通過的電流,磁飽和之前,電流越大,力矩就越大。然而,線圈是由細銅線繞制而成的,根據焦耳定律Q=I2R (1)大電流將導致產熱量飆升,產生的熱量迅速積聚便導致線圈絕緣層熔化,最終燒毀電機。
這就引出了第一個矛盾:為了獲得更大的力矩,我們希望電流盡可能大;但為了保護電機,電流又不能超過額定值。然而,這只是表面矛盾,真正的麻煩還在后面。
三、電感的“拖延癥”
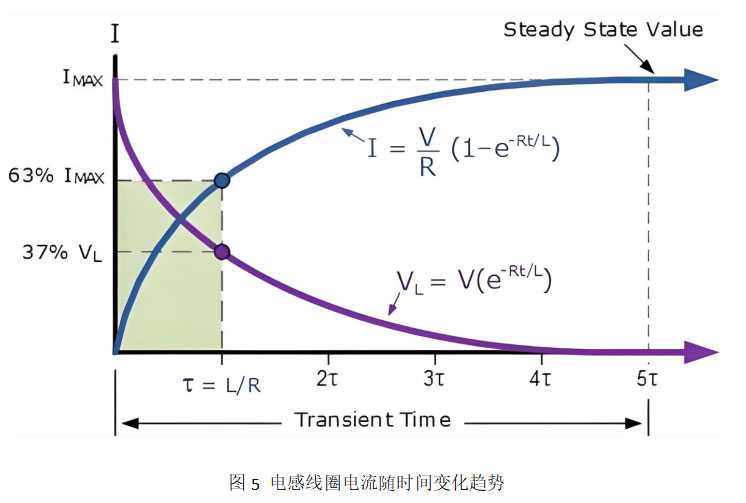
線圈不僅具有電阻,還具有電感。電感是一種抵抗電流變化的特性——當電壓施加到線圈兩端時,電流不會瞬間跳變到穩態值U/R,而是按照以下公式逐步上升:
I(t)=UR(1?e?tL/R) (2)
式中,L/R被稱為時間常數,它決定了電流上升的快慢。以一個典型的步進電機為例:相電阻R=9Ω,相電感L=18mH,則時間常數τ=L/R=2ms。這意味著,電流達到穩態值的63%需要2ms,達到95%則需要約3個時間常數(6ms)。
這一特性在電機高速運轉時帶來了嚴峻挑戰。
四、電壓選擇的困境
假設我們給線圈施加一個較低的電壓,比如9V。那么穩態電流為9V/9Ω=1A,我們假設1A為電機的額定電流。當電機低速運轉時,電流有足夠的時間達到穩態,并沒有問題。但當電機轉速提高時(比如300rpm),每相通電時間可能只有1ms。在1ms的時間內,電流能上升到多少?根據電流公式,t=1ms時,I=1A×(1?e^?0.5)≈0.39A——還不到額定電流的40%。電流不足,力矩自然不足,電機高速時便“無力”、丟步甚至堵轉。
看來電壓低了不行,那如果提高電壓呢?比如施加24V。這時在高速下,1ms內,電流上升到24/9×(1?e^?0.5)≈1A,似乎勉強滿足需求。但回到低速情況下,單相線圈的通電時間足夠長,而穩態電流將達到24/9≈2.6A,遠超額定值,這時線圈的發熱是額定狀況下的7倍,電機嚴重發熱甚至燒毀。我們發現:我們無法同時滿足“低速時電流不過大”和“能高速時電流快速建立”這兩個要求。這便是步進電機驅動中最核心的矛盾:電壓與轉速的矛盾。
五、從妥協到恒流控制
為了解決這一矛盾,我們嘗試過多種方法。
最初采用的單電壓恒壓驅動方式,為了改善高速性能,采用了高電壓+串聯電阻的方案——高速時能快速拉升電流,低速時又能通過串聯電阻限流,避免過熱。但問題在于這種方法效率非常低,串聯電阻發熱嚴重,消耗了大量功率。
后來逐漸開發出了高低壓驅動方案:在通電開始階段,施加高電壓,快速拉升電流;一旦電流達到額定值,立刻切換到低電壓,維持電流。這種方法在一定程度上兼顧了快速響應和穩態安全,但控制邏輯較為復雜,且高低壓切換點的確定不夠精確,仍然存在過沖風險。
這些方法本質上都是電流“開環”控制,無法根據實際電流值動態調整,因此難以做到精確、高效。直到斬波恒流驅動技術的出現,這一矛盾才被真正解決。
斬波恒流驅動的核心思想是:無論電機處于高速還是低速狀態,始終讓線圈電流保持在一個恒定值,即額定電流。斬波恒流驅動器往往采用高電壓供電(例如24V、48V),但通過閉環控制來限制電流。
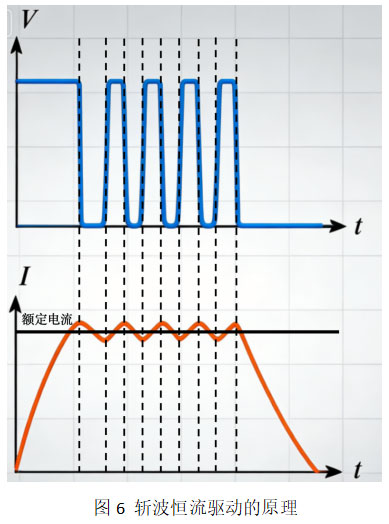
在通電初期,電流遠低于設定值,驅動器將開關管完全導通,將高電壓直接施加到線圈兩端,電流以極快的速度上升,在極短時間內達到設定值(例如在48V下,上述線圈電流達到1A所需的時間為0.4s)。這就解決了高速時“來不及建立電流”的問題。而電流一旦達到額定值,驅動器立即關斷開關,電流便停止上升,轉而“原路降低”,驅動器檢測到電流低于額定值時,又立即打開開關,使得電流繼續升高。就在這不斷開關過程中(也就是所謂的“斬波”),電流在額定值附近“反復橫跳”,形成鋸齒狀的電流波形,其平均值始終等于設定值。這個過程可以形象地理解為:用一個高壓“泵”快速把電流抽上來,再用一個精密的“閥門”控制住,不讓它超過安全線。無論電機轉速如何變化,驅動器通過檢測實際電流并實時調整開關管的導通與關斷,始終將電流鉗制在設定值。而這個過程中電流是如何被檢測的呢?實際上電路中設置了一個小的檢測電阻,通過檢測該電阻兩端的電壓值來計算回路中的電流。一般的驅動器都可以通過撥碼開關設置額定電流,這個撥碼實際上就是調整檢測電阻的阻值。
斬波恒流控制完美地解決了前述的矛盾:高電壓保證了電流能夠快速建立,從而即使在高頻時也能輸出足夠力矩;恒流控制保證了電流不會超過額定值,避免電機燒毀。同時,由于開關管主要工作在飽和導通和完全關斷狀態,其自身損耗遠低于電阻限流方案,驅動效率大大提高。
如今,斬波恒流驅動控制已成為最主流的驅動方式,它讓步進電機能夠在從每分鐘幾十轉到上千轉的寬速域內,始終保持穩定的輸出力矩,成為工業自動化領域不可或缺的基礎元件。






























