我們知道步進電機主要分為永磁式(PM)、可變磁阻式(VR)以及混合式(HB)三類。永磁式步進電機的轉矩來源于定子勵磁磁場和轉子的永磁磁場的相互作用,稱為電磁轉矩;可變磁阻式步進電機沒有永磁體,轉矩來源于電機凸極結構磁阻最低的傾向,稱為磁阻轉矩。而混合式步進電機結合了永磁式(PM)和可變磁阻式(VR)步進電機的特點,因此轉矩來源于電磁轉矩和磁阻轉矩的合成作用,本文將詳細拆解混合式步進電機的轉矩來源。
1.永磁轉矩
永磁轉矩提供了混合式步進電機最主要的轉矩,源自勵磁線圈產生的磁場和轉子永磁磁場的相互作用。
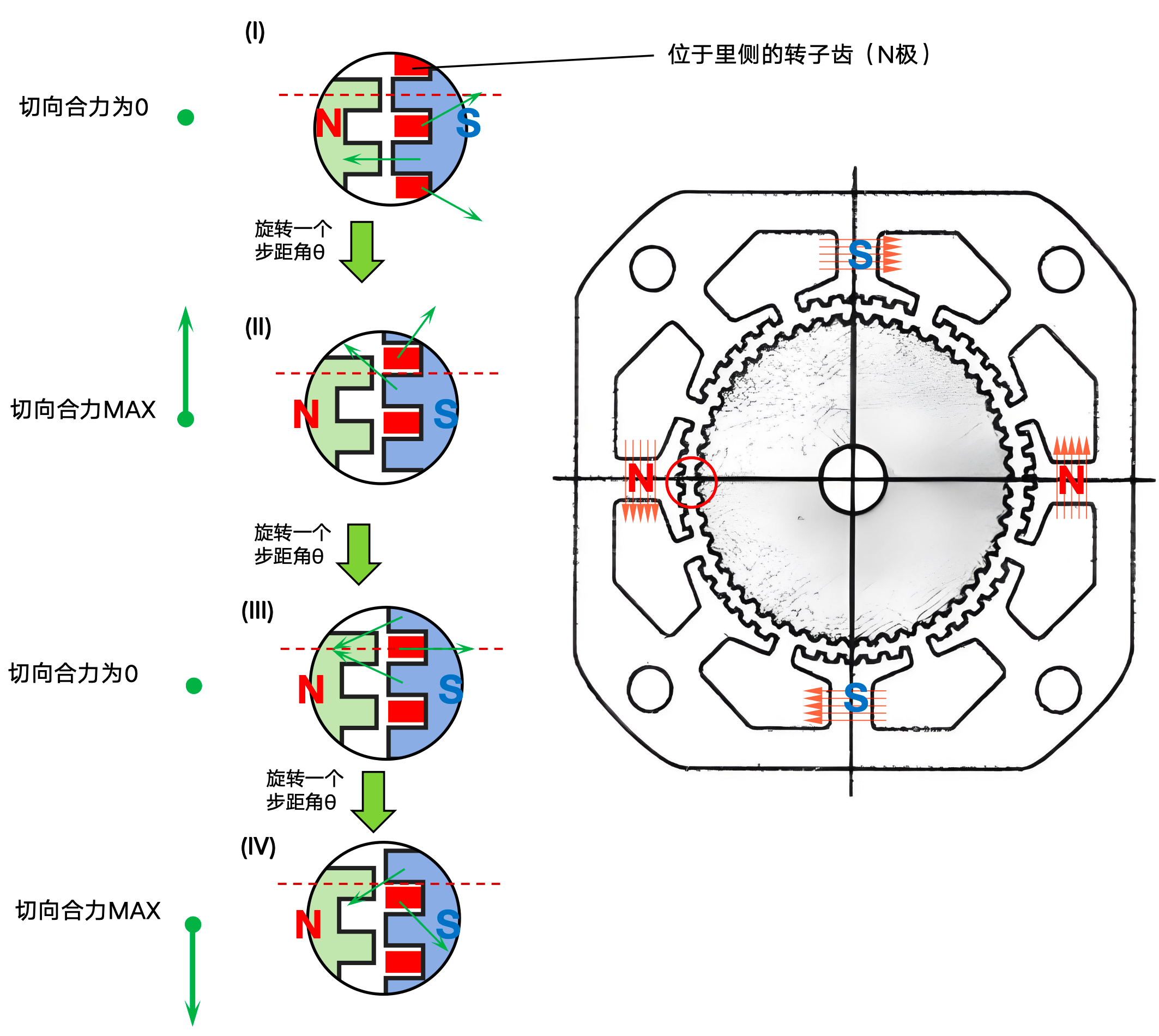
圖1 單相通電,轉子在不同位置的受力分析
如圖1所示,我們給一臺步進電機的一相通電,定子左右兩個極是N極,上下兩極是S極;轉子靠外側是S極,里側是N極。以最左側的定轉子齒為例來分析,位置(I)顯然是一個穩定的平衡位置,轉子定子的N極齒和轉子的S極(外側)齒對齊,與轉子的N極(內側)齒錯開。對轉子做受力分析,可以發現每個定子齒對轉子的電磁作用力是對稱的,在切向相互抵消合力為0。
順時針轉動轉子,會產生相反方向的轉矩,試圖將轉子拉回位置(I),當轉動一個步距角θ,到半對齊位置(II)時,切向的合力達到最大值。再繼續轉動,切向力將逐漸減小,當轉動2θ到齒槽相互錯開位置(III)時,切向合力為零。
繼續旋轉,定子對轉子的合力變成和運動方向一致(順時針)并逐漸變大,在轉動3θ到位置(IV)時達到最大。繼續轉動,轉矩逐步減小至0,即回到位置(I),轉矩完成了一個完整周期的變化。
由上面的分析可以發現,電磁轉矩的變化周期是4個步距角,這正好對應了一個完整的電磁周期。若規定轉動方向為正,那么轉動角度在0-2θ時,轉矩為負,轉動角度在2θ-4θ時,轉矩為正。那么電磁轉矩可以表達為:
 |
(1) |
其中,Tm為電磁轉矩,T’為最大電磁轉矩,α為轉動角度(電角度),一個步距角對應的電角度為π/2,Tm的函數曲線如圖2所示。
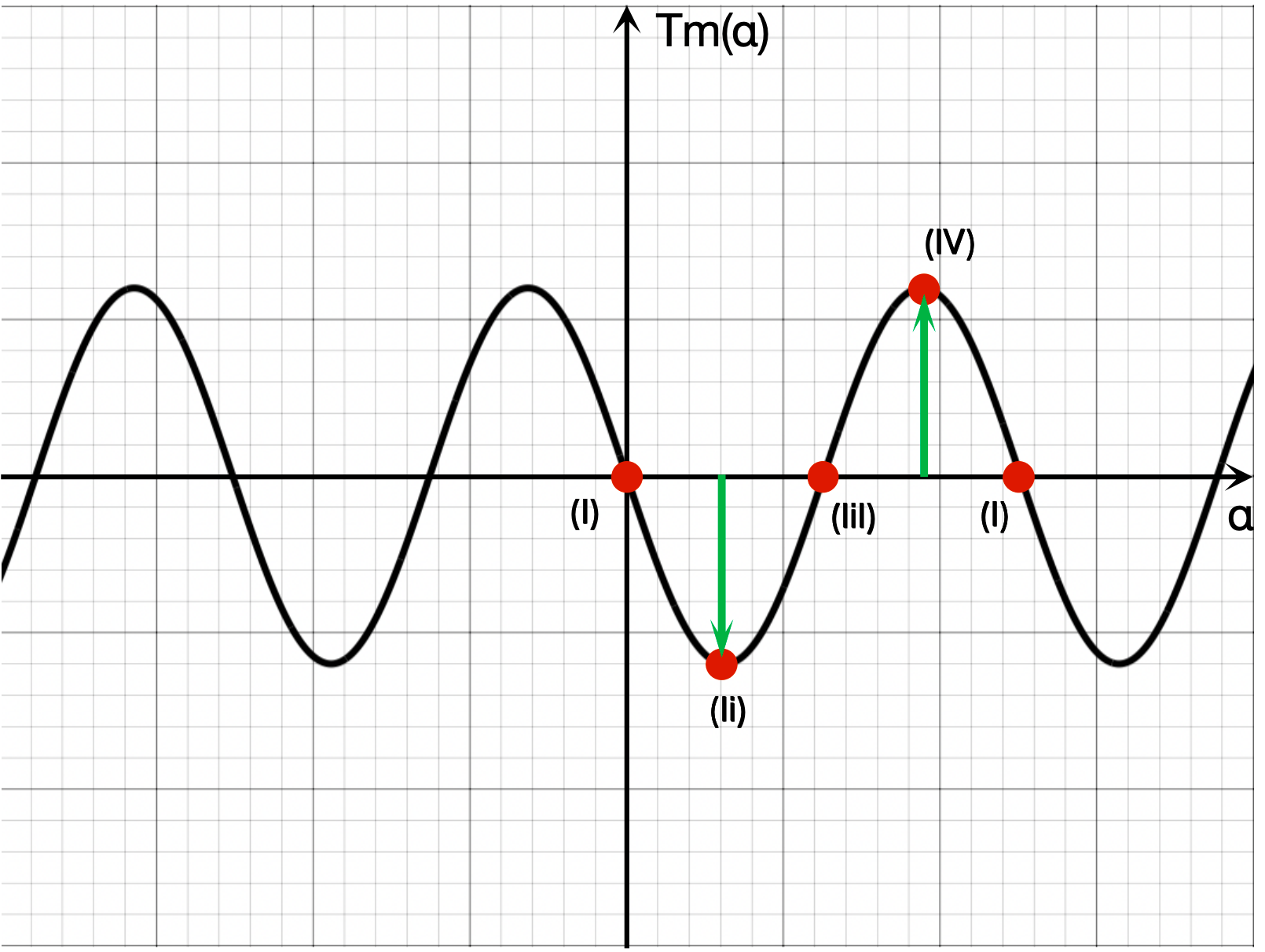
圖2 電磁轉矩的關于旋轉角度的函數曲線
2.磁阻轉矩
磁阻轉矩是由單純的凸極結構形成的轉矩,研究磁阻轉矩的時候應當將電磁轉矩的影響剔除,也就是轉子永磁體不要充磁。在這種情況下,由于轉子齒和定子齒之間氣隙磁阻的周期性變化導致周期性磁阻轉矩的形成。對于凸極結構,磁阻轉矩也遵循三角函數的變化規律,但周期是電磁轉矩的一半。這個可以通過最簡單的凸極結構來理解。
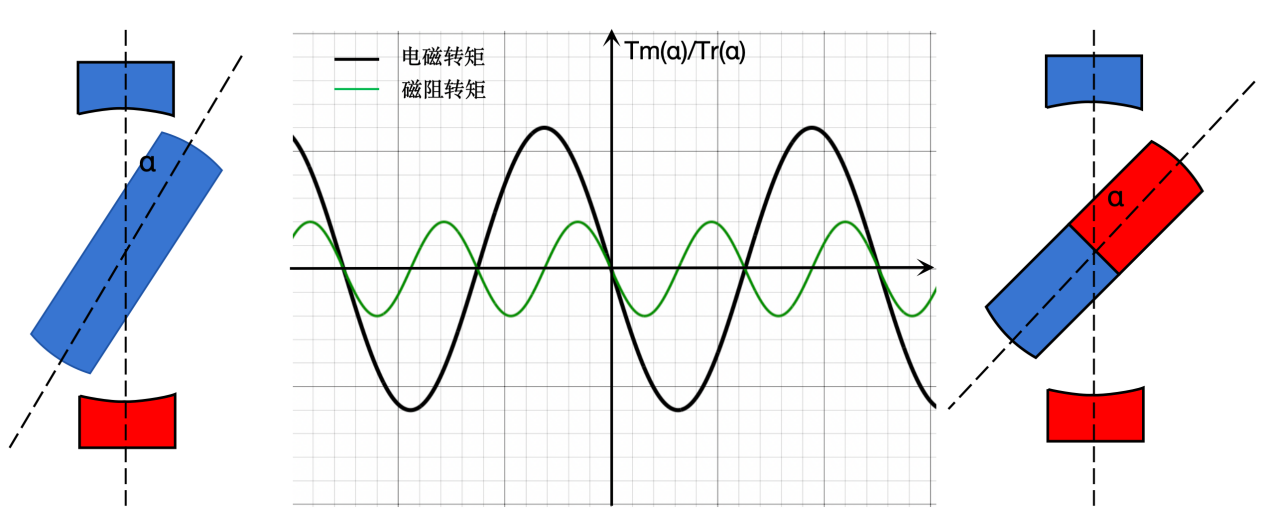
圖3 兩極凸極結構的電磁轉矩和磁阻轉矩與旋轉角度的關系
如圖3 所示,定子有兩個極,轉子是兩個凸極。假如轉子是永磁體,那么旋轉一周,永磁轉矩經歷了一個周期;如果轉子是軟磁體,那么,轉子的磁阻轉矩則經歷了兩個周期。
因此對于一般的混合式步進電機,相對定子極是同性的,所以定轉子齒對齊的位置是一個不穩定平衡點,偏離該位置,轉矩方向和運動方向相同,因此磁阻轉矩可以表達為:
 |
(2) |
其中,Tr為電磁轉矩,T’’為最大磁阻轉矩,α為轉動角度(電角度),一個步距角對應的電角度為π/2。電磁轉矩、磁阻轉矩以及兩者的合成轉矩圖像如圖4所示。
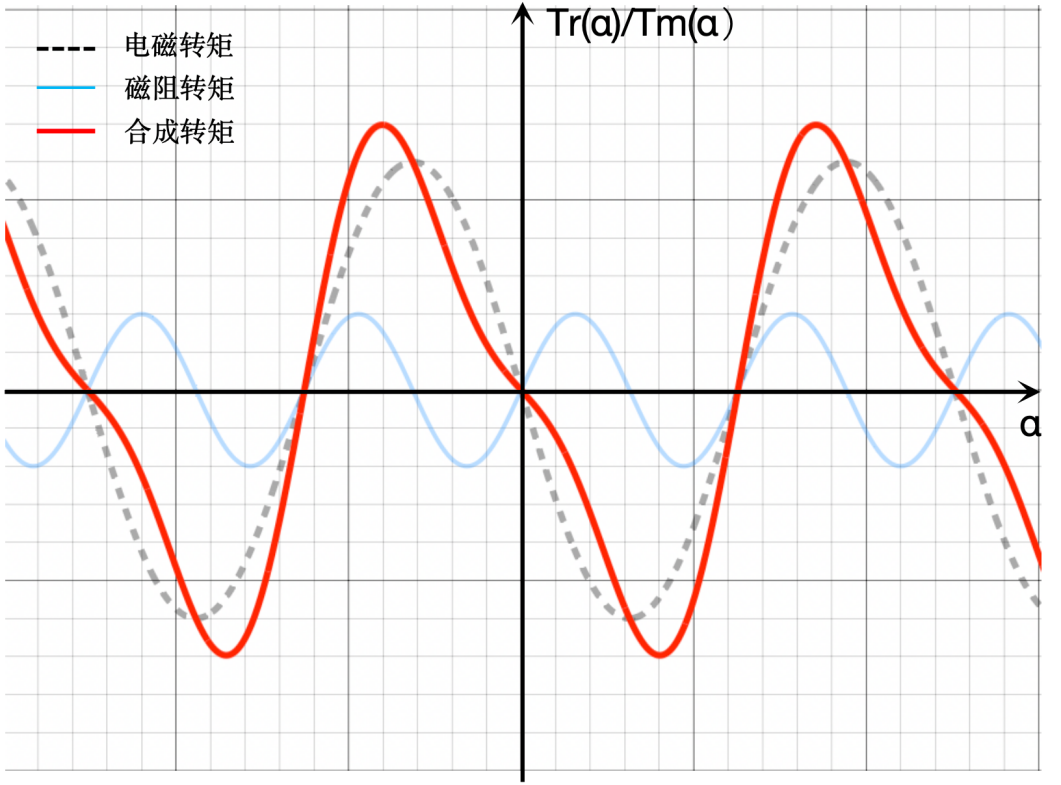
圖4 磁阻轉矩與電磁轉矩與偏轉角度的函數關系
3.齒槽轉矩
除了電磁轉矩、磁阻轉矩之外,混合式步進電機還存在所謂的齒槽轉矩。在定子線圈不通電的情況下轉動轉子,可以感受到有規律的振動,這就齒槽轉矩,也叫做“定位力矩”,這是由于永磁體轉子和凸極結構趨向于磁阻最小狀態產生的轉矩。在混合式步進電機中,齒槽轉矩僅包含4k次諧波分量[1],考慮到高次諧波分量的幅值非常小,因此我們僅考慮4次諧波分量。也就是說齒槽轉矩可以表達為:
 |
(3) |
其中,Tc為電磁轉矩,T’’’為最大齒槽轉矩,α為轉動角度(電角度),一個步距角對應的電角度為π/2。
那么在齒槽轉矩加入之后,電機合成轉矩與偏轉角度之間的函數曲線如圖5所示。
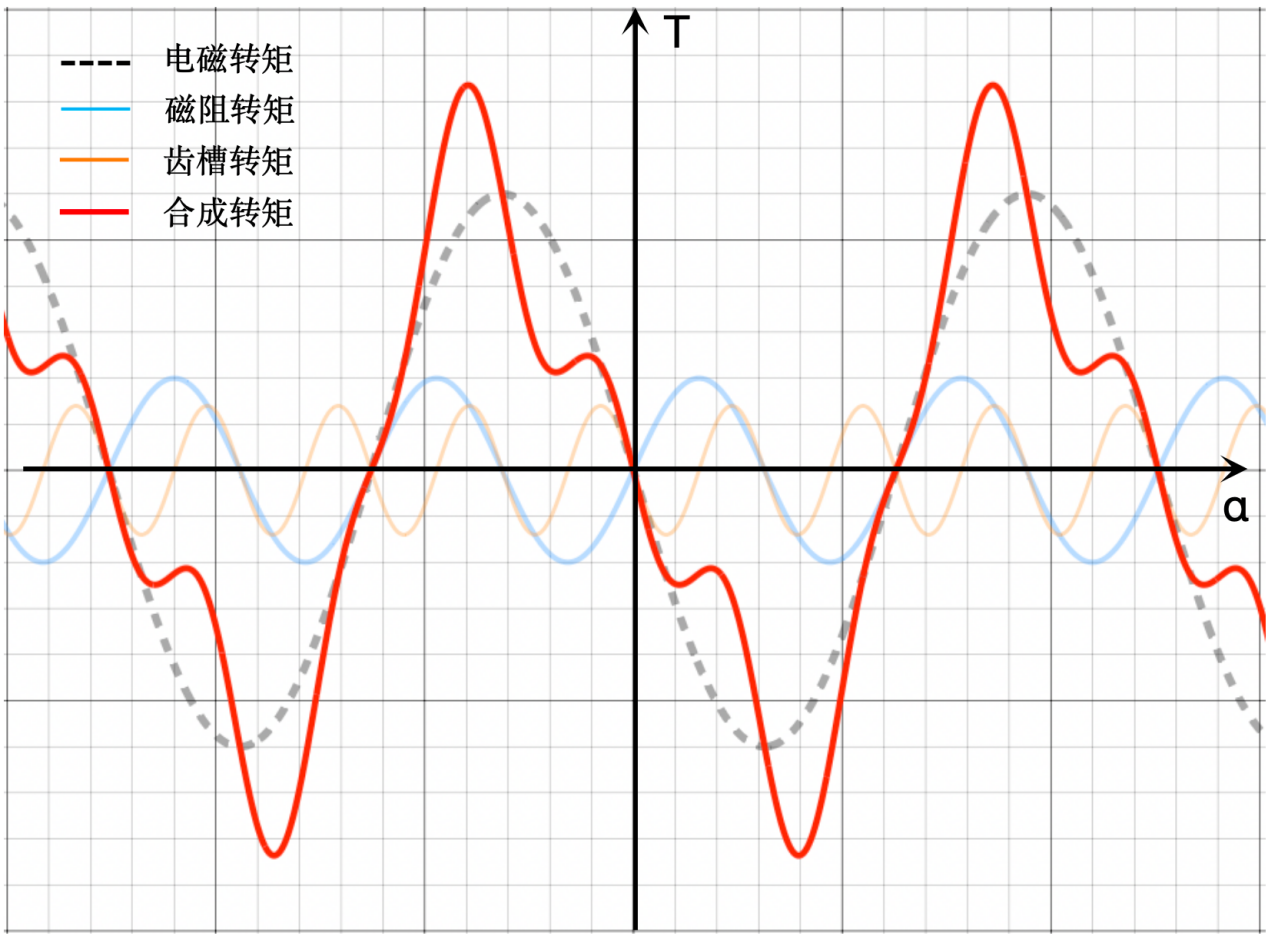
圖5 電磁轉矩、磁阻轉矩與齒槽轉矩的合成轉矩與偏轉角度的函數關系
當然,在以上分析中,我們并不知道電磁轉矩、磁阻轉矩和齒槽轉矩的幅值是多少,所以圖5所繪的函數圖只是一個示意圖,只能做參考。那么實際上,混合式步進電機的以上三種轉矩的幅值是多少呢? 我用力矩儀分別做了測量。
首先,測試的樣機是金的電機生產的HD42型混合式步進電機,三種轉矩的測試條件和結果如下所示:
|
測試條件 |
轉矩/cNm |
電磁轉矩 |
2A,單相通電 |
250 |
磁阻轉矩 |
2A,單相通電,不充磁 |
9 |
齒槽轉矩 |
不通電 |
17 |
可以看出,磁阻轉矩、齒槽轉矩與電磁轉矩的大小相差了一個數量級,在電機的運行過程中主要還是由電磁轉矩其主要作用。
我們可以發現,在電機運行過程中,齒槽轉矩的函數是不變的,因此齒槽轉矩做功:
 |
(4) |
而齒槽轉矩是一個周期函數,因此其積分可以看做是0。由此可見,齒槽轉矩在實際運行中,平均效果是不做功的,僅對合成轉矩造成畸變。
根據上面實測的結果,將圖5重新繪制,可以得到實際的三種轉矩的合成效果,如圖6所示。可以看出雖然磁阻轉矩和齒槽轉矩的幅值很小,但還是對實際的轉矩波形造成了影響,使其偏離了正弦波形。
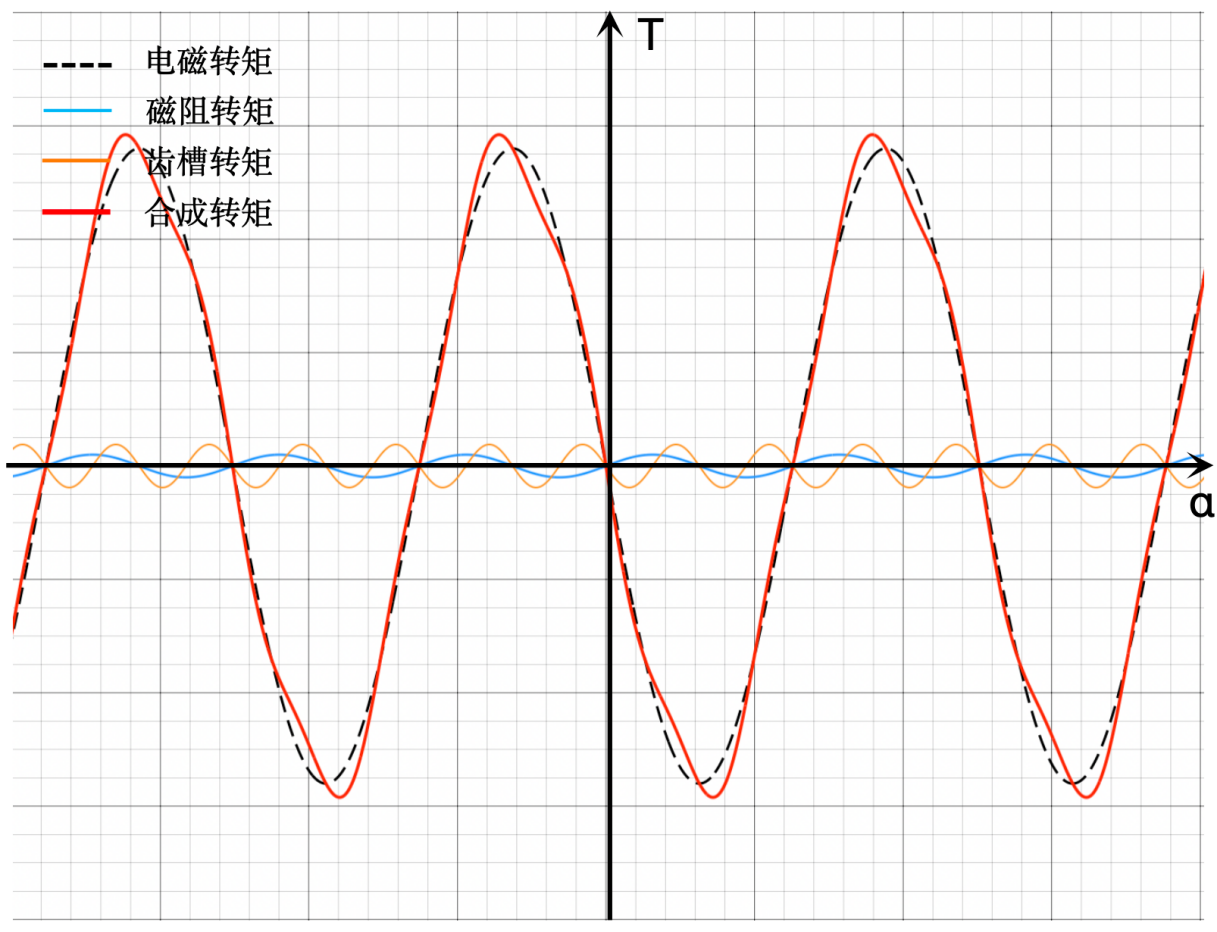
圖6 電磁轉矩、磁阻轉矩與齒槽轉矩的合成轉矩與偏轉角度的函數關系
綜上,我們可以得出以下結論:
(1)電磁轉矩周期為4個步距角(4θ),磁阻轉矩周期為2θ,齒槽轉矩周期為θ。
(2)混合式步進電機的轉矩來自于電磁轉矩和磁阻轉矩的合成轉矩,電磁轉矩占絕對主導地位。齒槽轉矩在運行過程中是保守力矩,平均效果為不做功。
(3)對于實際的混合式步進電機,電磁轉矩的幅值比磁阻轉矩、齒槽轉矩(實際也是磁阻轉矩)大一個數量級。






























